关于Unity中DepthOfField的记录
关于定制Unity中DepthOfField的记录
00 前言
策划需要将景深进行分段控制
直接对深度进行重映射是最方便的做法
https://www.desmos.com/calculator/outz8ciqgx
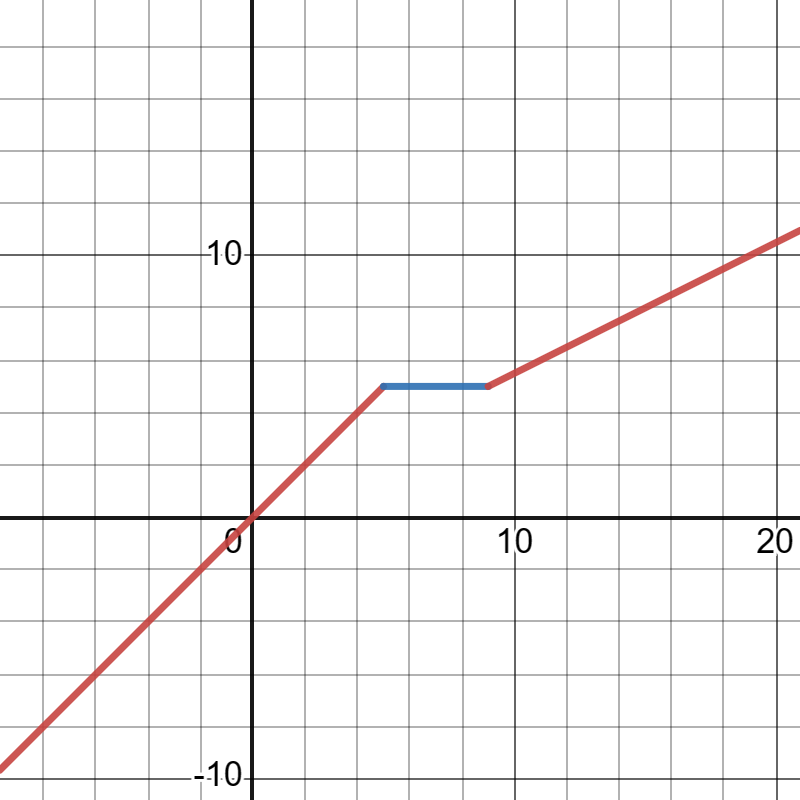
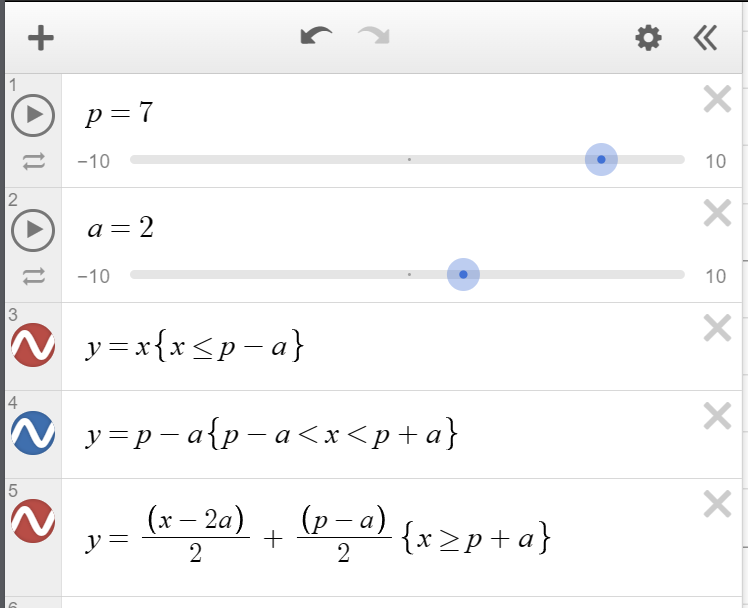
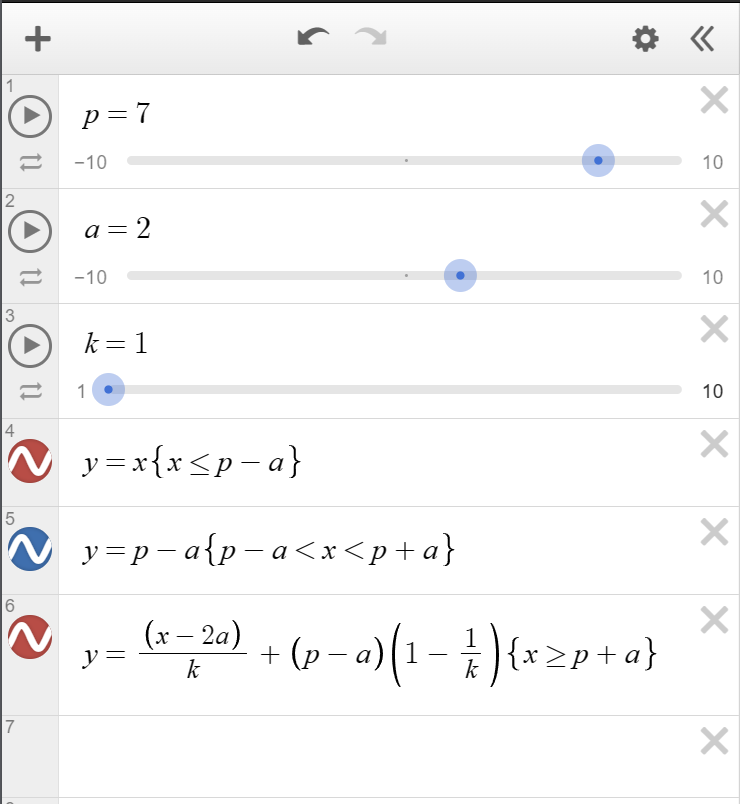
- 我希望斜率不仅仅是2, 而是可以是任何值, 且方程连续
- y=(x-2a)/k+i
- 且x=p+a时, y=p-a
- 求出i=(p-a)(1-1/k)
- 最后y=(x-2a)/k+(p-a)(1-1/k).
- https://www.desmos.com/calculator/5aebyotklu
01 初版
初始版本关键代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
//Changed
//P面板=p-a
//p=p面板+a
//使用k改变变化速率,将远近的模糊程度分开
//Todo 优化算法, 消除if
float a = 2.0;
float p = 7.0;
float k = 3;//斜率
if (linearEyeDepth <= p - a)
{
linearEyeDepth = linearEyeDepth;
}
else if (linearEyeDepth > p - a && linearEyeDepth < p + a)
{
linearEyeDepth = p - a;
}
else if (linearEyeDepth >= p + a)
{
linearEyeDepth = (linearEyeDepth - 2.0 * a) / k + (p - a) * (1.0 - 1 / k);
}
//Changed
02 优化
考虑到if...else在着色器中效率不高, 这里使用step进行了优化.
1
2
3
4
5
6
float condition1 = step(p - a, linearEyeDepth) * step(linearEyeDepth, p + a);
float condition2 = step(p + a, linearEyeDepth);
linearEyeDepth = condition1 * (p - a) +
condition2 * ((linearEyeDepth - 2.0 * a) / k + (p - a) * (1.0 - 1 / k)) +
(1.0 - condition1 - condition2) * linearEyeDepth;
当然, 这里可以用rcp(k)来把除法消除进行优化
1
2
3
4
5
6
7
float invK = rcp(k);
float condition1 = step(p - a, linearEyeDepth) * step(linearEyeDepth, p + a);
float condition2 = step(p + a, linearEyeDepth);
linearEyeDepth = condition1 * (p - a) +
condition2 * ((linearEyeDepth - 2.0 * a) * invK + (p - a) * (1.0 - invK)) +
(1.0 - condition1 - condition2) * linearEyeDepth;
但是, 实际上, 1/k这个值可以在传入之前就计算完毕, 所以更进一步, invK的计算直接交给CPU即可.
彩色石头
在搜索rcp(x)的时候, 找到了一些好玩的东西.
Packages/com.unity.render-pipelines.core@14.0.8/Runtime/PostProcessing/Shaders/ffx/ffx_a.hlsl文件中, 关于*FLOAT APPROXIMATIONS*(浮动近似值)的部分有如下注释1 2 3 4 5 6 7 8 9 10 11 12 13 14
//============================================================================================================================== // FLOAT APPROXIMATIONS //------------------------------------------------------------------------------------------------------------------------------ // Michal Drobot has an excellent presentation on these: "Low Level Optimizations For GCN", // - Idea dates back to SGI, then to Quake 3, etc. // - https://michaldrobot.files.wordpress.com/2014/05/gcn_alu_opt_digitaldragons2014.pdf // - sqrt(x)=rsqrt(x)*x // - rcp(x)=rsqrt(x)*rsqrt(x) for positive x // - https://github.com/michaldrobot/ShaderFastLibs/blob/master/ShaderFastMathLib.h //------------------------------------------------------------------------------------------------------------------------------ // These below are from perhaps less complete searching for optimal. // Used FP16 normal range for testing with +4096 32-bit step size for sampling error. // So these match up well with the half approximations. //==============================================================================================================================
其中的pdf文件有一些特别的优化方式, 当然, pdf是2014年的, 无法保证仍旧有效, 毕竟硬件发展迅速.
Packages/com.unity.render-pipelines.core@14.0.8/ShaderLibrary/API/GLES2.hlsl中, 由于rcp(x)函数的不支持, 所以有如下预定义#define rcp(x) 1.0 / (x)关于
rcp(x)的兼容性, 还有这一篇文章unity shader SSAO 环境光屏蔽 rcp 函数 bug - 知乎 (zhihu.com)```c++ #if (SHADER_TARGET < 50 && !defined(SHADER_API_PSSL)) float rcp(float value) { return 1.0 / value; } #endif
总之就是, 要使用
rcp(x)函数, 需要用额外的语句保证兼容性.
03 另一种方式
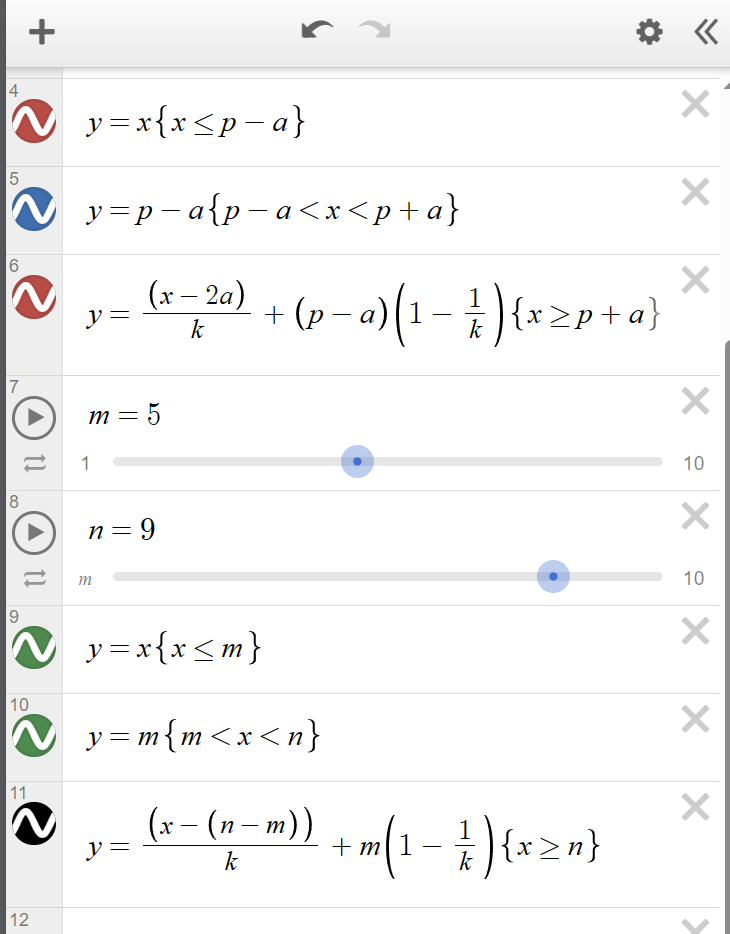
之前用的是定位 $p$ 点, 然后前后扩展 $a$ 距离的方式, 现在是定好近位置 $m$ 和远位置 $n$ 然后来处理, 代码修改如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
// float a = 2.0;
// float p = 7.0;
float k = 3;//斜率//
float invK = rcp(k);
// float condition1 = step(p - a, linearEyeDepth) * step(linearEyeDepth, p + a);
// float condition2 = step(p + a, linearEyeDepth);
//
// linearEyeDepth = condition1 * (p - a) +
// condition2 * ((linearEyeDepth - 2.0 * a) * invK + (p - a) * (1.0 - invK)) +
// (1.0 - condition1 - condition2) * linearEyeDepth;
float m = 5;
float n = 9;
float condition1 = step(m, linearEyeDepth) * step(linearEyeDepth, n);
float condition2 = step(n, linearEyeDepth);
linearEyeDepth = condition1 * m + condition2 * ((linearEyeDepth - (n - m)) * invK +
m * (1.0 - invK)) + (1.0 - condition1 - condition2) * linearEyeDepth;
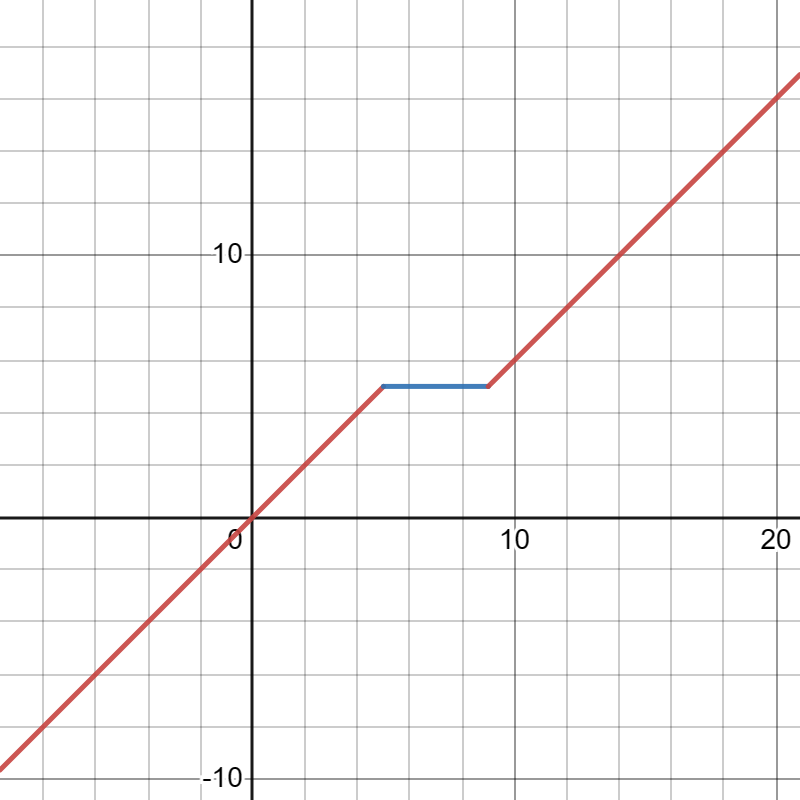
图像如下: 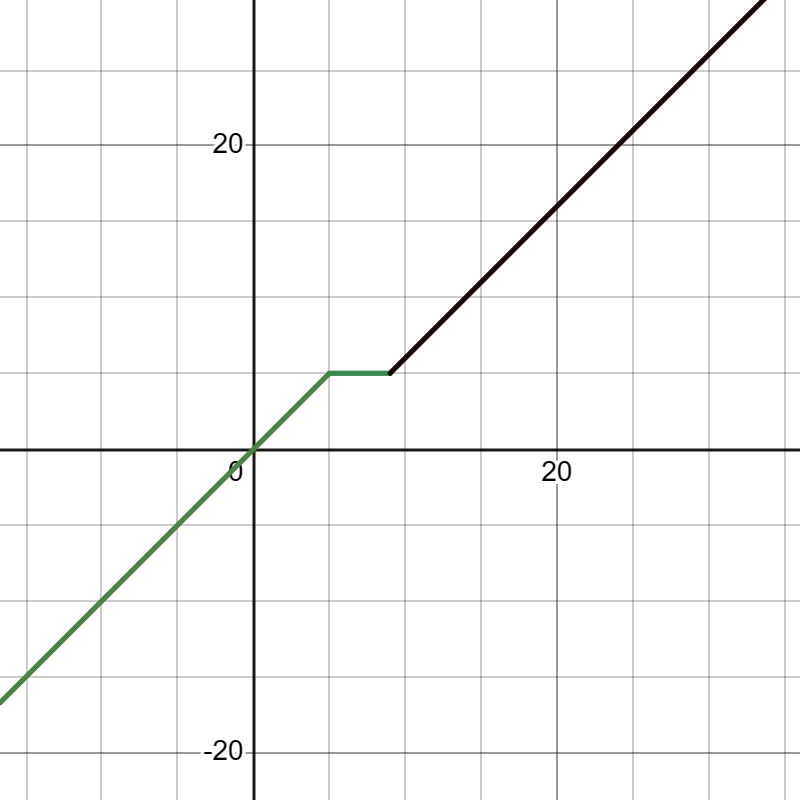
04 定制记录
注释标识: //C10132023
涉及文件:
- 着色器:
Packages/com.unity.render-pipelines.universal@14.0.8/Shaders/PostProcessing/BokehDepthOfField.shader - 面板:
Packages/com.unity.render-pipelines.universal@14.0.8/Runtime/Overrides/DepthOfField.csPackages/com.unity.render-pipelines.universal@14.0.8/Editor/Overrides/DepthOfFieldEditor.cs - Pass:
Packages/com.unity.render-pipelines.universal@14.0.8/Runtime/Passes/PostProcessPass.cs
彩色石头:
- DOF的算法有这样的注释
*// "A Lens and Aperture Camera Model for Synthetic Image Generation" [Potmesil81]* - A lens and aperture camera model for synthetic image generation | ACM SIGGRAPH Computer Graphics
- 文件下载
- 81年的算法
- Unity Gizmos使用绘制-CSDN博客
参考网页:
Depth Of Field | Universal RP | 14.0.9 (unity3d.com)
图形学基础|景深效果(Depth of Field/DOF)_后处理dof 原理-CSDN博客
光学成像原理之景深(Depth of Field)-CSDN博客
Unity Shader PostProcessing - 7 - DepthOfField(DOF)景深-CSDN博客
完整代码
shader代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
half FragCoCV2(Varyings input) : SV_Target
{
UNITY_SETUP_STEREO_EYE_INDEX_POST_VERTEX(input);
uint w;
uint h;
#if defined(SHADER_API_GLCORE)
// GetDimensions will use textureQueryLevels in OpenGL and that's not
// supported in OpenGL 4.1 or below. In that case we use _MainTex_TexelSize
// which is fine as we don't support dynamic scaling in OpenGL.
w = _MainTex_TexelSize.z;
h = _MainTex_TexelSize.w;
#elif defined(UNITY_STEREO_INSTANCING_ENABLED) || defined(UNITY_STEREO_MULTIVIEW_ENABLED)
uint x;
_CameraDepthTexture.GetDimensions(w, h, x);
#else
_CameraDepthTexture.GetDimensions(w, h);
#endif
float2 uv = UnityStereoTransformScreenSpaceTex(input.uv);
float depth = LOAD_TEXTURE2D_X(_CameraDepthTexture, float2(w, h) * uv).x;
float linearEyeDepth = LinearEyeDepth(depth, _ZBufferParams);
//C10132023
float m = _CoCParams.x;
float n = _FarClearPlane;
float invK = _FarBlurAttend;
float condition1 = step(m, linearEyeDepth) * step(linearEyeDepth, n);
float condition2 = step(n, linearEyeDepth);
linearEyeDepth = condition1 * m + condition2 * ((linearEyeDepth - (n - m)) * invK +
m * (1.0f - invK)) + (1.0f - condition1 - condition2) * linearEyeDepth;
//C10132023
half coc = (1.0h - FocusDist / linearEyeDepth) * MaxCoC;
half nearCoC = clamp(coc, -1.0h, 0.0h);
half farCoC = saturate(coc);
return saturate((farCoC + nearCoC + 1.0h) * 0.5h);
}
...
Pass
{
Name "Bokeh Depth Of Field CoC Ver 2"
HLSLPROGRAM
#pragma vertex Vert
#pragma fragment FragCoCV2
#pragma target 3.0
ENDHLSL
}
Pass代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
void DoDepthOfField(Camera camera, CommandBuffer cmd, int source, int destination, Rect pixelRect)
{
if (m_DepthOfField.mode.value == DepthOfFieldMode.Gaussian)
DoGaussianDepthOfField(camera, cmd, source, destination, pixelRect);
else if (m_DepthOfField.mode.value == DepthOfFieldMode.Bokeh)
DoBokehDepthOfField(cmd, source, destination, pixelRect);
//C10132023
else if (m_DepthOfField.mode.value == DepthOfFieldMode.BokehVer2)
{
DoBokehDepthOfFieldV2(cmd, source, destination, pixelRect);
}
//C10132023
}
...
void DoBokehDepthOfFieldV2(CommandBuffer cmd, int source, int destination, Rect pixelRect)
{
m_DepthOfField.nearClearPlane.value = URPUserData.NearClearPlane;
m_DepthOfField.farClearPlane.value = URPUserData.FarClearPlane;
m_DepthOfField.farBlurAttend.value = URPUserData.FarBlurAttend;
m_DepthOfField.focalLength.value = URPUserData.FocalLength;
m_DepthOfField.aperture.value = URPUserData.Aperture;
var material = m_Materials.bokehDepthOfField;
int wh = m_Descriptor.width / 2;
int hh = m_Descriptor.height / 2;
// "A Lens and Aperture Camera Model for Synthetic Image Generation" [Potmesil81]
float F = m_DepthOfField.focalLength.value / 1000f;
float A = m_DepthOfField.focalLength.value / m_DepthOfField.aperture.value;
//C10132023
// float P = m_DepthOfField.focusDistance.value;
float P = m_DepthOfField.nearClearPlane.value / 100f;
//C10132023
float maxCoC = (A * F) / (P - F);
float maxRadius = GetMaxBokehRadiusInPixels(m_Descriptor.height);
float rcpAspect = 1f / (wh / (float)hh);
//C10132023
float N = m_DepthOfField.farClearPlane.value / 100f; //因为是厘米
float farBlurAttend = m_DepthOfField.farBlurAttend.value;
cmd.SetGlobalFloat(ShaderConstants._FarClearPlane, N);
cmd.SetGlobalFloat(ShaderConstants._FarBlurAttend, farBlurAttend);
//C10132023
cmd.SetGlobalVector(ShaderConstants._CoCParams, new Vector4(P, maxCoC, maxRadius, rcpAspect));
// Prepare the bokeh kernel constant buffer
int hash = m_DepthOfField.GetHashCode();
if (hash != m_BokehHash)
{
m_BokehHash = hash;
PrepareBokehKernel();
}
cmd.SetGlobalVectorArray(ShaderConstants._BokehKernel, m_BokehKernel);
// Temporary textures
cmd.GetTemporaryRT(ShaderConstants._FullCoCTexture, GetStereoCompatibleDescriptor(m_Descriptor.width, m_Descriptor.height, GraphicsFormat.R8_UNorm), FilterMode.Bilinear);
cmd.GetTemporaryRT(ShaderConstants._PingTexture, GetStereoCompatibleDescriptor(wh, hh, GraphicsFormat.R16G16B16A16_SFloat), FilterMode.Bilinear);
cmd.GetTemporaryRT(ShaderConstants._PongTexture, GetStereoCompatibleDescriptor(wh, hh, GraphicsFormat.R16G16B16A16_SFloat), FilterMode.Bilinear);
// Compute CoC
cmd.Blit(source, ShaderConstants._FullCoCTexture, material, 5);
cmd.SetGlobalTexture(ShaderConstants._FullCoCTexture, ShaderConstants._FullCoCTexture);
// Downscale & prefilter color + coc
cmd.Blit(source, ShaderConstants._PingTexture, material, 1);
// Bokeh blur
cmd.Blit(ShaderConstants._PingTexture, ShaderConstants._PongTexture, material, 2);
// Post-filtering
cmd.Blit(ShaderConstants._PongTexture, BlitDstDiscardContent(cmd, ShaderConstants._PingTexture), material, 3);
// Composite
cmd.SetGlobalTexture(ShaderConstants._DofTexture, ShaderConstants._PingTexture);
cmd.Blit(source, BlitDstDiscardContent(cmd, destination), material, 4);
// Cleanup
cmd.ReleaseTemporaryRT(ShaderConstants._FullCoCTexture);
cmd.ReleaseTemporaryRT(ShaderConstants._PingTexture);
cmd.ReleaseTemporaryRT(ShaderConstants._PongTexture);
}
面板, Runtime
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
using System;
namespace UnityEngine.Rendering.Universal
{
public enum DepthOfFieldMode
{
Off,
Gaussian, // Non physical, fast, small radius, far blur only
Bokeh,
//C10132023
BokehVer2
//C10132023
}
[Serializable, VolumeComponentMenu("Post-processing/Depth Of Field")]
public sealed class DepthOfField : VolumeComponent, IPostProcessComponent
{
[Tooltip("Use \"Gaussian\" for a faster but non physical depth of field; \"Bokeh\" for a more realistic but slower depth of field.")]
public DepthOfFieldModeParameter mode = new DepthOfFieldModeParameter(DepthOfFieldMode.Off);
[Tooltip("The distance at which the blurring will start.")]
public MinFloatParameter gaussianStart = new MinFloatParameter(10f, 0f);
[Tooltip("The distance at which the blurring will reach its maximum radius.")]
public MinFloatParameter gaussianEnd = new MinFloatParameter(30f, 0f);
[Tooltip("The maximum radius of the gaussian blur. Values above 1 may show under-sampling artifacts.")]
public ClampedFloatParameter gaussianMaxRadius = new ClampedFloatParameter(1f, 0.5f, 1.5f);
[Tooltip("Use higher quality sampling to reduce flickering and improve the overall blur smoothness.")]
public BoolParameter highQualitySampling = new BoolParameter(false);
[Tooltip("The distance to the point of focus.")]
public MinFloatParameter focusDistance = new MinFloatParameter(10f, 0.1f);
[Tooltip("The ratio of aperture (known as f-stop or f-number). The smaller the value is, the shallower the depth of field is.")]
public ClampedFloatParameter aperture = new ClampedFloatParameter(5.6f, 1f, 32f);
[Tooltip("The distance between the lens and the film. The larger the value is, the shallower the depth of field is.")]
public ClampedFloatParameter focalLength = new ClampedFloatParameter(50f, 1f, 300f);
[Tooltip("The number of aperture blades.")]
public ClampedIntParameter bladeCount = new ClampedIntParameter(5, 3, 9);
[Tooltip("The curvature of aperture blades. The smaller the value is, the more visible aperture blades are. A value of 1 will make the bokeh perfectly circular.")]
public ClampedFloatParameter bladeCurvature = new ClampedFloatParameter(1f, 0f, 1f);
[Tooltip("The rotation of aperture blades in degrees.")]
public ClampedFloatParameter bladeRotation = new ClampedFloatParameter(0f, -180f, 180f);
//C10132023
/// <summary>
/// 近清晰面与摄像机距离(厘米)
/// </summary>
[Tooltip("近清晰面与摄像机距离(厘米)")]
public MinIntParameter nearClearPlane = new MinIntParameter(value: 500, 1);
/// <summary>
/// 远清晰面与摄像机距离(厘米)
/// </summary>
[Tooltip("远清晰面与摄像机距离(厘米)")]
public MinIntParameter farClearPlane = new MinIntParameter(value: 900, min: 2);
/// <summary>
/// 远端模糊度强度
/// </summary>
[Tooltip("远端模糊度强度")]
public ClampedFloatParameter farBlurAttend = new ClampedFloatParameter(value: 1.0f, min: 0.1f, max: 1.0f);
//C10132023
public bool IsActive()
{
if (mode.value == DepthOfFieldMode.Off || SystemInfo.graphicsShaderLevel < 35)
return false;
return mode.value != DepthOfFieldMode.Gaussian || SystemInfo.supportedRenderTargetCount > 1;
}
public bool IsTileCompatible() => false;
}
[Serializable]
public sealed class DepthOfFieldModeParameter : VolumeParameter<DepthOfFieldMode> { public DepthOfFieldModeParameter(DepthOfFieldMode value, bool overrideState = false) : base(value, overrideState) { } }
}
面板, Editor
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
using UnityEngine.Rendering.Universal;
namespace UnityEditor.Rendering.Universal
{
[VolumeComponentEditor(typeof(DepthOfField))]
sealed class DepthOfFieldEditor : VolumeComponentEditor
{
SerializedDataParameter m_Mode;
SerializedDataParameter m_GaussianStart;
SerializedDataParameter m_GaussianEnd;
SerializedDataParameter m_GaussianMaxRadius;
SerializedDataParameter m_HighQualitySampling;
SerializedDataParameter m_FocusDistance;
SerializedDataParameter m_FocalLength;
SerializedDataParameter m_Aperture;
SerializedDataParameter m_BladeCount;
SerializedDataParameter m_BladeCurvature;
SerializedDataParameter m_BladeRotation;
//C10132023
private SerializedDataParameter m_NearClearPlane;
private SerializedDataParameter m_FarClearPlane;
private SerializedDataParameter m_FarBlurAttend;
//C10132023
public override void OnEnable()
{
var o = new PropertyFetcher<DepthOfField>(serializedObject);
m_Mode = Unpack(o.Find(x => x.mode));
m_GaussianStart = Unpack(o.Find(x => x.gaussianStart));
m_GaussianEnd = Unpack(o.Find(x => x.gaussianEnd));
m_GaussianMaxRadius = Unpack(o.Find(x => x.gaussianMaxRadius));
m_HighQualitySampling = Unpack(o.Find(x => x.highQualitySampling));
m_FocusDistance = Unpack(o.Find(x => x.focusDistance));
m_FocalLength = Unpack(o.Find(x => x.focalLength));
m_Aperture = Unpack(o.Find(x => x.aperture));
m_BladeCount = Unpack(o.Find(x => x.bladeCount));
m_BladeCurvature = Unpack(o.Find(x => x.bladeCurvature));
m_BladeRotation = Unpack(o.Find(x => x.bladeRotation));
//C10132023
m_NearClearPlane = Unpack(o.Find(x => x.nearClearPlane));
m_FarClearPlane = Unpack(o.Find(x => x.farClearPlane));
m_FarBlurAttend = Unpack(o.Find(x => x.farBlurAttend));
//C10132023
}
public override void OnInspectorGUI()
{
if (UniversalRenderPipeline.asset?.postProcessingFeatureSet == PostProcessingFeatureSet.PostProcessingV2)
{
EditorGUILayout.HelpBox(UniversalRenderPipelineAssetEditor.Styles.postProcessingGlobalWarning, MessageType.Warning);
return;
}
PropertyField(m_Mode);
if (m_Mode.value.intValue == (int)DepthOfFieldMode.Gaussian)
{
PropertyField(m_GaussianStart, EditorGUIUtility.TrTextContent("Start"));
PropertyField(m_GaussianEnd, EditorGUIUtility.TrTextContent("End"));
PropertyField(m_GaussianMaxRadius, EditorGUIUtility.TrTextContent("Max Radius"));
PropertyField(m_HighQualitySampling);
}
else if (m_Mode.value.intValue == (int)DepthOfFieldMode.Bokeh)
{
PropertyField(m_FocusDistance);
PropertyField(m_FocalLength);
PropertyField(m_Aperture);
PropertyField(m_BladeCount);
PropertyField(m_BladeCurvature);
PropertyField(m_BladeRotation);
}
//C10132023
else if (m_Mode.value.intValue == (int)DepthOfFieldMode.BokehVer2)
{
// PropertyField(m_FocusDistance);
PropertyField(m_NearClearPlane);
PropertyField(m_FarClearPlane);
PropertyField(m_FarBlurAttend);
PropertyField(m_FocalLength);
PropertyField(m_Aperture);
PropertyField(m_BladeCount);
PropertyField(m_BladeCurvature);
PropertyField(m_BladeRotation);
}
//C10132023
}
}
}